04 | 瞬时运动学
7177 6 张图片 28
这一章主要讲的是关节空间和笛卡尔空间之间的桥梁——雅可比矩阵
从运动学方程微分、向量积构造法、速度向外传递、力向内传递逐步认识到雅可比矩阵这一强大的工具
前置知识
\[
\frac{d\vec{x}}{d\vec{q}}=\frac{d\begin{bmatrix}x_1\\x_2\\x_3\end{bmatrix}}{d\begin{bmatrix}q_1\\q_2\end{bmatrix}}=\begin{bmatrix}\frac{dx_1}{dq_1}&\frac{dx_1}{dq_2}\\\frac{dx_2}{dq_1}&\frac{dx_2}{dq_2}\\\frac{dx_3}{dq_1}&\frac{dx_3}{dq_2}\end{bmatrix}
\]
时变位姿
本节内容:角速度的表示、线速度的表示、如何在不同连杆之间传递速度
由理论力学知:刚体(其联体坐标系为 \(B\) {A} \(^A \!O_B\) \(^A \!O_B\)
所以这一节先研究如何表示运动
本节的一些符号表示
符号
含义
注意点
\({}^B\mathbf{V}_Q\) 线速度向量
\(\mathbf{v}_C\) 相对于世界坐标系
\(\mathbf{v}_C = {}^U\mathbf{V}_{\text{CORG}}\)
\({}^A\Omega_B\) 角速度向量
在 {A} {B}
\(\mathbf{\omega}_C\) 相对于世界坐标系角速度
\(\mathbf{\omega}_C = {^U_C}\mathbf{\Omega}_C\)
坐标系的平移
同维矢量的微分表示
若 \( {}^B\mathbf{Q} \) {B} \( {}^B\mathbf{V}_Q \)
\[
{}^B\mathbf{V}_Q = \frac{d}{dt} {}^B\mathbf{Q} = \lim_{\Delta t \to 0} \frac{{}^B\mathbf{Q}(t + \Delta t) - {}^B\mathbf{Q}(t)}{\Delta t}
\]
速度矢量 \( {}^B\mathbf{V}_Q \) ( B B A )
\[
{}^A({}^B\mathbf{V}_Q) = {}^A_B\mathbf{R} {}^B\mathbf{V}_Q = ^A(\frac{d}{dt} {}^B\mathbf{Q}) = \lim_{\Delta t \to 0} {}^A_B\mathbf{R}(t) \left( \frac{{}^B\mathbf{Q}(t + \Delta t) - {}^B\mathbf{Q}(t)}{\Delta t} \right)
\]
坐标系原点相对于世界坐标系 {U} :\(\mathbf{v}_C = {}^U\mathbf{V}_{\text{CORG}}\)
需要注意,\({}^A({}^B\mathbf{V}_Q)\) \({}^A\mathbf{V}_Q\)
\[
\begin{align*}
{}^A\mathbf{V}_Q &= \lim_{\Delta t \to 0} \frac{{}^A\mathbf{Q}(t + \Delta t) - {}^A\mathbf{Q}(t)}{\Delta t}\\
&= \lim_{\Delta t \to 0} \frac{{}^A\mathbf{P}_{BORG}(t + \Delta t) + {}^A_B\mathbf{R}(t + \Delta t) {}^B\mathbf{Q}(t + \Delta t) - {}^A\mathbf{P}_{BORG}(t) - {}^A_B\mathbf{R}(t) {}^B\mathbf{Q}(t)}{\Delta t}
\end{align*}
\]
特别注意符号的意义
\({}^A\mathbf{v}_C = {}^A_U\mathbf{R} \mathbf{v}_C = {}^A_U\mathbf{R} {}^U\mathbf{V}_{\text{CORG}} \neq {}^A\mathbf{V}_{\text{CORG}}\)
坐标系的转动
在 \(\{A\}\) \(\{B\}\) \(^A\mathbf{\Omega}_B\) \(^A\mathbf{\Omega}_B\) 的方向是瞬轴在 \(\{A\}\) 中的方向
- \(^A\mathbf{\Omega}_B\) 的大小表示在 \(\{A\}\) 中 \(\{B\}\) 绕瞬轴的旋转速度。
- 在任意坐标系中描述:\(^C(^A\mathbf{\Omega}_B) = {^C_A}\mathbf{R}{^A\mathbf{\Omega}_B}\)
- 世界坐标系:\(\mathbf{\omega}_C = {^U_C}\mathbf{\Omega}_C\)
特别要注意下列符号的意思
\[
\begin{align*}
^A\mathbf{\omega}_C &= {^U_C}\mathbf{R}\mathbf{\omega}_C = {^A_U}\mathbf{R}{^U_C}\mathbf{\Omega}_C \neq {^A\mathbf{\Omega}_C}\\
^C\mathbf{\omega}_C &= {^C_U}\mathbf{R}\mathbf{\omega}_C = {^C_U}\mathbf{R}{^U_C}\mathbf{\Omega}_C
\end{align*}
\]
刚体线速度
\[
^A\mathbf{V}_Q = {^A\mathbf{V}_{BORG}} + {^A_B}\mathbf{R}{^B\mathbf{V}_Q} + {^A\mathbf{\Omega}_B} \times {^A_B}\mathbf{R}{^B\mathbf{Q}}
\]
\(Q\) \({A}\) \({B}\) \(Q\) \({B}\) \({B}\) \({A}\) \(Q\)
角速度关系
\[
{^A\mathbf{\Omega}_C} = {^A\mathbf{\Omega}_B} + {^A_B}\mathbf{R}{^B_C}\mathbf{\Omega}_C
\]
在同一坐标系中,角速度可以相加
角速度矩阵 \(S(\mathbf{\omega})\)
\[
S(\mathbf{\omega}) = \begin{bmatrix}
0 & -\omega_z & \omega_y \\
\omega_z & 0 & -\omega_x \\
-\omega_y & \omega_x & 0
\end{bmatrix}
\]
连杆间速度传递(向外迭代法)
规律
前一个关节的线速度和角速度都要转换到后一个关节上面
转动型关节会增加角速度的项,平动型关节会增加线速度的项。
转动型关节
角速度:连杆 i+1 {i+1}
\[
^{i+1}\!\omega_{i+1} = ^{i+1}_i\!R {^i\omega_i} + \dot{\theta}_{i+1} {}^{i+1}\!\hat{Z}_{i+1}\\
\]
其中,\(\hat{Z}_{i+1}\) \(i+1\) \({i+1}\) \({\theta}_{i+1}\) \(i+1\)
线速度:连杆 i+1 {i+1}
\[
{}^{i+1}\!v_{i+1} = {^{i+1}_iR} (^iv_i + ^i\omega_i \times {^iP_{i+1}})
\]
连杆的长度隐含在了 \(^iP_{i+1}\)
平动型
角速度:不变
\[
^{i+1}\omega_{i+1} = _i^{i+1}R {^i\omega_i}
\]
线速度:要加一个在轴线上的速度
\[
^{i+1}v_{i+1} = _i^{i+1}R (^iv_i + ^i\omega_i \times ^iP_{i+1}) + \dot{d_{i+1}} \hat{Z}_{i+1}
\]
静力学
力学基本概念
力的大小: 衡量力对平动的作用效果
力矩: 衡量力对转动的作用效果
力偶: 等大反向不共线的力,所有旋转都可以等效看作是力偶的作用。也就是说,力形成力偶,才使得物体发生了旋转。
力偶矩: 用来描述物体力偶的作用效果
物体平衡的条件: 合力为 0 0
参考资料力矩、力偶矩、弯矩的区别是什么? - 知乎 力矩的本质是什么?与力偶有什么关系? - 知乎
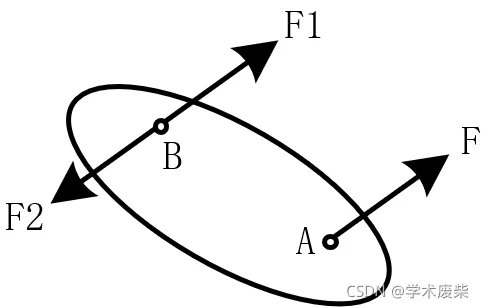
力的平移原理
引理 1
引理 2
所以如果想将力平移,那么可以在 B B A \(F\) \(F_2\)
可以看作力 \(F\) \(F_1\) \(F_1\) \(M = F \times r_{AB}\)
图源 力平移定理与平衡 - CSDN
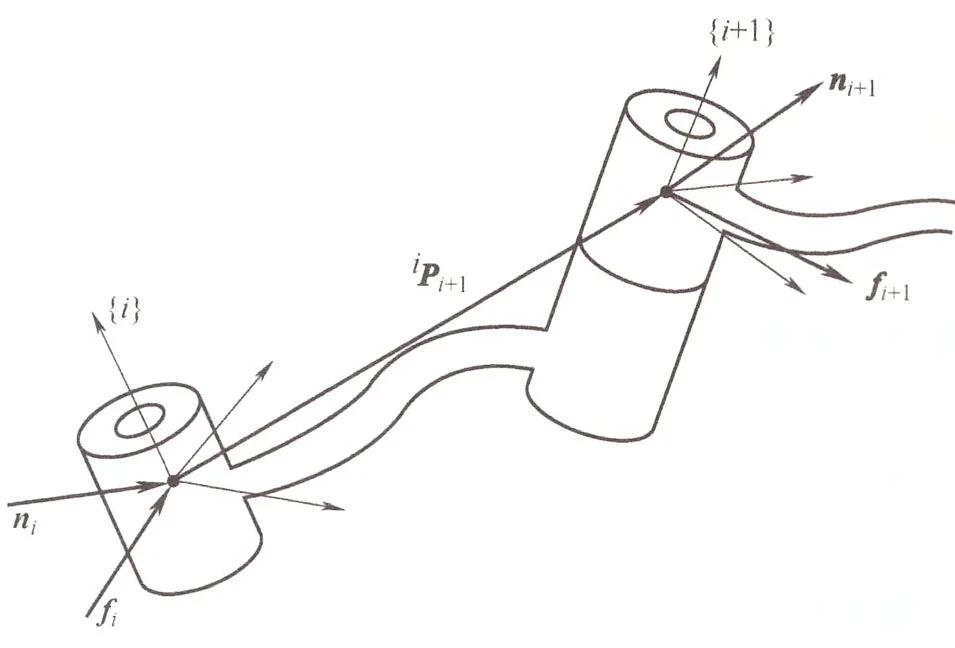
操作臂的静力传递(向内迭代法)
要解决的问题是:如果机械臂末端抓着一个重物,为了保持末端位置不动,各个关节需要输出多大的力矩呢?或者如果机械臂末端要对工件施加一个固定的加工力,各个关节又需要输出多大的力矩呢?
传递方向:从末端向下传递
方式:先固定,写出各连杆的平衡关系,再加外力,写出各关节轴需要加多少力
忽略重力
\[
\begin{align*}
^i f_i = ^i f_{i+1}\\
^i n_i = ^i n_{i+1} + ^{i}P_{i+1} \times ^{i}f_{i+1}
\end{align*}
\]
加上坐标系变换后
\[
\begin{align*}
^i f_i = ^{i}_{i+1}R ^{i+1} f_{i+1}\\
^i n_i = ^{i}_{i+1}R^{i+1} n_{i+1} + ^{i}P_{i+1} \times ^{i}f_{i+1}
\end{align*}
\]
转动型关节需要考虑施加多少力矩 , . ( )
转动型关节 \(i\)
\(f_i\) \(i\) \(n_i\) \(i\) \(\{i\}\) \(n_i\) 1 \(\hat{z}_i\) 1 \(\hat{z}_i\) \(\hat{z}_i\) \(\hat{z}_i\) \(i\) \(\tau_i \hat{z}_i\)
\[
\tau_i = |n_i| \cos \theta = |n_i| |\hat{z}_i| \cos \theta = n_i^{\mathrm{T}} \hat{z}_i
\]
平动型关节 \(i\)
\(n_i\) \(\{i\}\) \(f_i\) 1 1 \(i\) \(\tau_i \hat{z}_i\)
\[
\tau_i = f_i^{\mathrm{T}} \hat{z}_i
\]
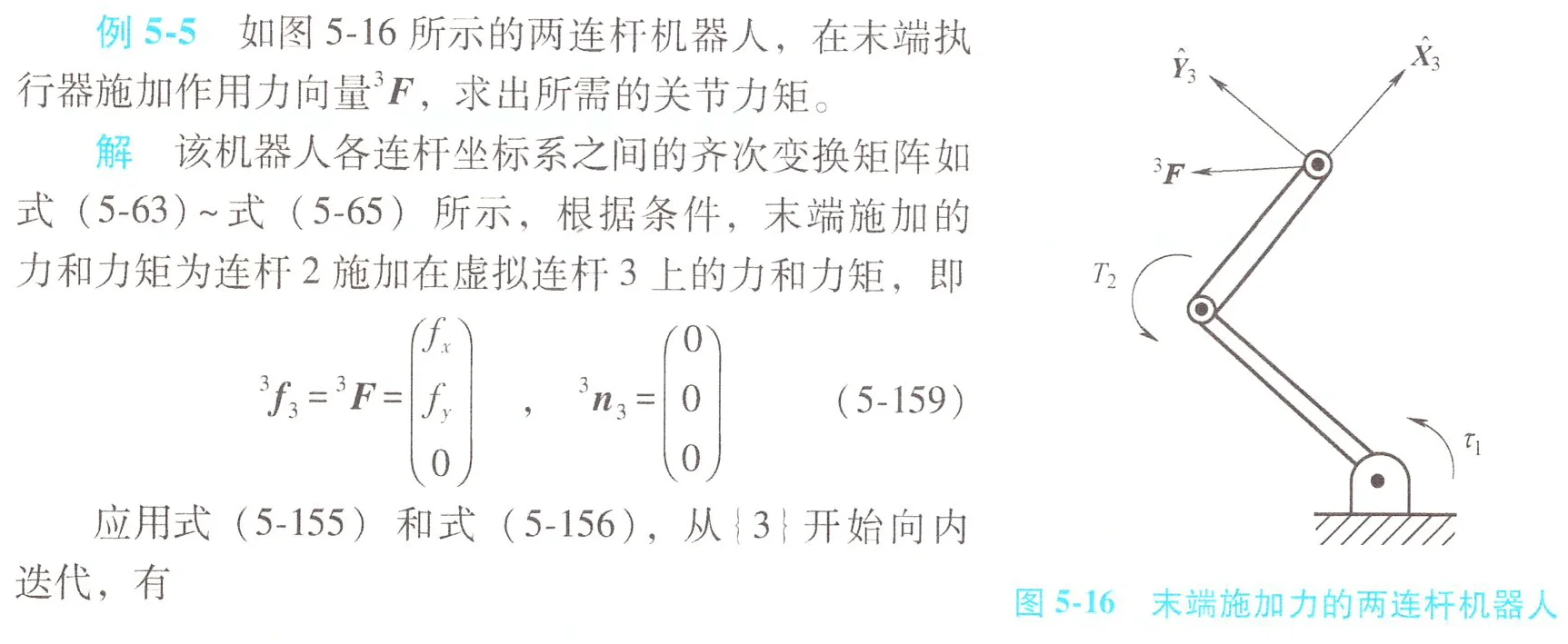
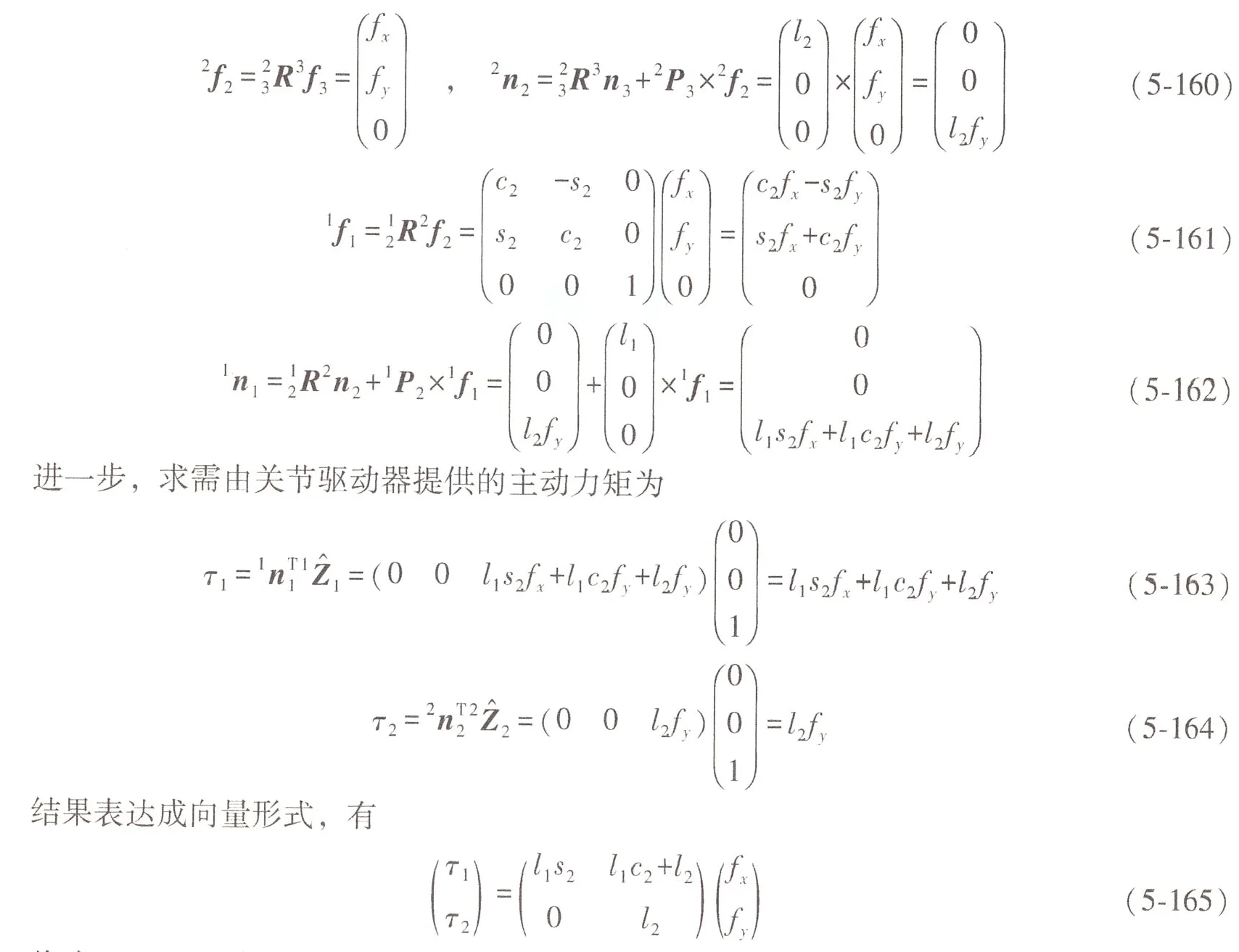
例子
课本习题
雅可比
雅可比矩阵的作用 :
雅可比将关节空间的速度转化为末端空间的速度:\(\dot{\mathbf{x}}=J(\mathbf{q})\dot{\mathbf{q}}\)
雅可比将关节空间的位移转化为末端空间的位移:\(\delta\mathbf{x}=J(\mathbf{q})\delta\mathbf{q}\)
雅可比将末端空间的速度转化为关节空间的速度:\(\dot{\mathbf{q}}=J(\mathbf{q})^{-1}\dot{\mathbf{x}}\)
雅可比将末端空间的位移转化为关节空间的位移:\(\delta\mathbf{q}=J(\mathbf{q})^{-1}\delta\mathbf{x}\)
雅可比将末端空间的力转化为关节空间的力 ( )\(\tau=J^T\mathbf{F}\)
直观理解
复杂变换在某个局部点可以看作线性变换
雅可比矩阵由来
关节速度 \(\dot{q}\) \(\dot{x}\)
速度描述的是短时间的位置变化,即位置关于时间的导数
\[
\frac{d\vec{x}}{dt}=\frac{df(\vec{q})}{dt}=\frac{df(\vec{q})}{d\vec{q}}\cdot\frac{d\vec{q}}{dt}
\]
\[
\dot{x}=\frac{d\vec{x}}{d\vec{q}}\cdot\dot{q} = J(q)\dot{q}
\]
第 \(i\) \(j\) \(j\) \(i\) /
雅可比矩阵表明 end effector joint velocity
\[
J=\begin{bmatrix}(J_v)_ {3\times n}\\(J_\omega)_ {3\times n}\end{bmatrix}
\]
\(J_v\) end effector
\(J_\omega\) end effector
雅可比矩阵的行数是操作空间的自由度,列数是关节数量(关节自由度) 。
雅可比矩阵是时变的
雅可比矩阵可以看作 x y \(\dot{x} = J(q) \dot{q}\)
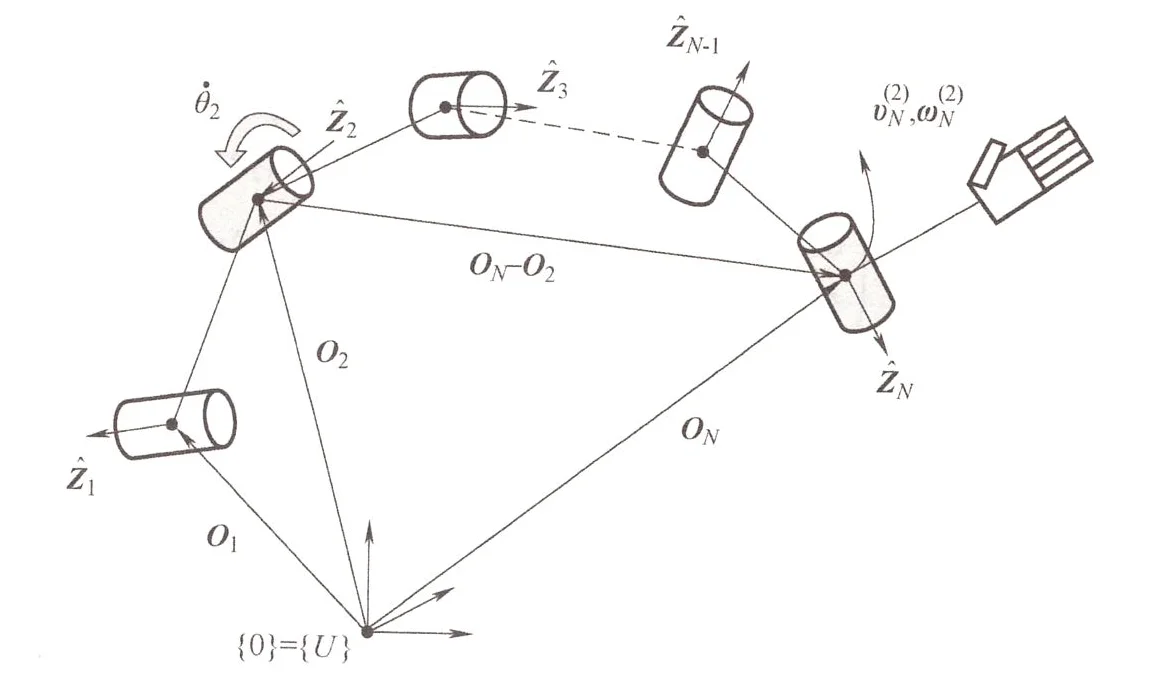
几何雅可比
以机器人每个关节均为转动型关节为例构造几何雅可比矩阵。
定义笛卡尔速度向量 \(v_N = \begin{pmatrix} v_N \\ \omega_N \end{pmatrix} \in \mathbb{R}^6\) \(\dot{\Phi} = \begin{pmatrix} \dot{\theta}_1 \\ \dot{\theta}_2 \\ \vdots \\ \dot{\theta}_N \end{pmatrix} \in \mathbb{R}^N\)
\[
v_N = \begin{pmatrix} \hat{Z}_1 \times (O_N - O_1) & \hat{Z}_2 \times (O_N - O_2) & \cdots & \hat{Z}_{N-1} \times (O_N - O_{N-1}) & 0 \\ \hat{Z}_1 & \hat{Z}_2 & \cdots & \hat{Z}_{N-1} & \hat{Z}_N \end{pmatrix} \dot{\Phi}\\
= \mathbf{J(\Phi)}\dot{\Phi}
\]
此处,\(J(\Phi) \in \mathbb{R}^{6 \times N}\)
分析雅可比
令 \(X=\begin{pmatrix}\boldsymbol{P}(\boldsymbol{\Phi})\\\boldsymbol{\psi}(\boldsymbol{\Phi})\end{pmatrix}\) \(\boldsymbol{P}(\boldsymbol{\Phi})\) \(\Psi(\boldsymbol{\Phi})\) ( )
\[\dot{\boldsymbol{X}}=\begin{pmatrix}\dot{\boldsymbol{P}}\\\dot{\boldsymbol{\psi}}\end{pmatrix}=\boldsymbol{J}_a(\boldsymbol{\Phi})\dot{\boldsymbol{\Phi}}\]
空间中确定一个旋转至少需要 3
SO(3) 群有 6 1) ,两个单位向量正交,叉乘得到第三个单位向量
所以自由度是 3
因为固定角 / 3 3 个参数) ,所以又称之为最小表示运动学方程
几何雅可比和分析雅可比
符号
含义
\(q\) 关节角度向量,表示机器人各个关节的角度值
\(\dot{q}\) 关节速度向量,表示关节变量的时间变化率
\(p_e\) or \(x\) 末端执行器的位置向量
\(\dot{p}_e\) or \(\dot{x}\) 末端执行器的位置变化率(平移速度)
\(\phi_e\) 末端执行器的姿态(通常用欧拉角表示)
\(\dot{\phi}_e\) 末端执行器的姿态变化率(旋转速度)
\(\omega\) 角速度向量,表示绕各个轴 的旋转速度
\(v\) 线速度向量,表示在笛卡尔空间中的平移速度
参考文献:机械臂的几何雅可比和分析雅可比有什么区别? - 知乎
Analytical Jacobians :
- 在笛卡尔坐标系下,它得到的“角速度”是选择的表示末端方向的角度的时间导数。
- 表示的是机器人姿态的变化。这个姿态是自己定义的,它取决于你的坐标系。
\[
\begin{align*}
\dot{x} &= \frac{d}{dt}(x, y, z, \phi, \theta, \psi) = \begin{bmatrix} \frac{dx}{dt} & \frac{dy}{dt} & \frac{dz}{dt} & \frac{d\phi}{dt} & \frac{d\theta}{dt} & \frac{d\psi}{dt} \end{bmatrix}^T\\
&= \begin{bmatrix}
\dot{P} \\
\dot{\phi}
\end{bmatrix}= J_A(q) \dot{q}
\end{align*}
\]
Geometrical Jacobians :
- 获得的“角速度”是绕旋转轴的速度。得到的是关节空间速度与末端力矩之间的映射关系。
\[
\begin{align*}
\dot{x} &= \begin{bmatrix} \frac{dx}{dt} & \frac{dy}{dt} & \frac{dz}{dt} & \omega_x & \omega_y & \omega_z \end{bmatrix}^T\\
&= \begin{bmatrix}
\dot{P} \\
\dot{\omega}
\end{bmatrix}= J(q) \dot{q}
\end{align*}
\]
其中,\(\omega_x\) 、\(\omega_y\) 、\(\omega_z\) \(x\) \(y\) 、\(z\)
转化关系
\[
J(\Phi) \dot{\Phi} = \begin{pmatrix} v \\ \omega \end{pmatrix} = \begin{pmatrix} \dot{P} \\ B_a(\Psi)\dot{\Psi} \end{pmatrix} = \begin{pmatrix} I & 0 \\ 0 & B_a(\Psi) \end{pmatrix} \begin{pmatrix} \dot{P} \\ \dot{\Psi} \end{pmatrix}= \begin{pmatrix} I & 0 \\ 0 & B_a(\Psi) \end{pmatrix} J_a(\Phi) \dot{\Phi}
\]
所以,分析雅可比矩阵 \(J_a(\Phi)\) \(J(\Phi)\)
\[
J_a(\Phi) = \begin{pmatrix} I & 0 \\ 0 & B_a^{-1}(\Psi) \end{pmatrix} J(\Phi) = T_a J(\Phi)
\]
刚体角速度 \(\omega\) \(\dot{\Psi}\)
\[
\omega = \begin{pmatrix}
0 & -s\alpha & c\alpha s\beta \\
0 & c\alpha & s\alpha s\beta \\
1 & 0 & c\beta
\end{pmatrix} \dot{\Psi} = B_a(\Psi) \dot{\Psi}
\]
证明
若刚体姿态矩阵为 \(R = \begin{pmatrix} r_{11} & r_{12} & r_{13} \\ r_{21} & r_{22} & r_{23} \\ r_{31} & r_{32} & r_{33}\end{pmatrix}\) , \(\omega\) \(\omega = \begin{pmatrix} \omega_x \\ \omega_y \\ \omega_z \end{pmatrix}\)
\[
\dot{R} R^T = S\\
\begin{pmatrix}
\dot{r}_{11} & \dot{r}_{12} & \dot{r}_{13} \\
\dot{r}_{21} & \dot{r}_{22} & \dot{r}_{23} \\
\dot{r}_{31} & \dot{r}_{32} & \dot{r}_{33}
\end{pmatrix}
\begin{pmatrix}
r_{11} & r_{21} & r_{31} \\
r_{12} & r_{22} & r_{32} \\
r_{13} & r_{23} & r_{33}
\end{pmatrix}=\begin{pmatrix}
0 & -\omega_z & \omega_y \\
\omega_z & 0 & -\omega_x \\
-\omega_y & \omega_x & 0
\end{pmatrix}
\]
对应元素相等可以得到
\[
\omega_x = \dot{r}_{31} r_{21} + \dot{r}_{32} r_{22} + \dot{r}_{33} r_{23}\\
\omega_y = \dot{r}_{11} r_{31} + \dot{r}_{12} r_{32} + \dot{r}_{13} r_{33}\\
\omega_z = \dot{r}_{21} r_{11} + \dot{r}_{22} r_{12} + \dot{r}_{23} r_{13}
\]
以 \(z-y-z\)
\[
R = R_{z'y'z'}(\alpha, \beta, \gamma) = R_z(\alpha) R_y(\beta) R_z(\gamma)= \begin{pmatrix}
c\alpha & -s\alpha & 0 \\
s\alpha & c\alpha & 0 \\
0 & 0 & 1
\end{pmatrix}
\begin{pmatrix}
c\beta & 0 & s\beta \\
0 & 1 & 0 \\
-s\beta & 0 & c\beta
\end{pmatrix}
\begin{pmatrix}
c\gamma & -s\gamma & 0 \\
s\gamma & c\gamma & 0 \\
0 & 0 & 1
\end{pmatrix}
\]
记 \(z-y-z\) \(\Psi = (\alpha, \beta, \gamma)^T\) \(\dot{\Psi} = (\dot{\alpha}, \dot{\beta}, \dot{\gamma})^T\)
\[
\begin{align*}
\omega_x &= \dot{r}_{31} r_{21} + \dot{r}_{32} r_{22} + \dot{r}_{33} r_{23}\\
&= \left( \frac{\partial r_{31}}{\partial \alpha} \dot{\alpha} + \frac{\partial r_{31}}{\partial \beta} \dot{\beta} + \frac{\partial r_{31}}{\partial \gamma} \dot{\gamma} \right) r_{21} + \left( \frac{\partial r_{32}}{\partial \alpha} \dot{\alpha} + \frac{\partial r_{32}}{\partial \beta} \dot{\beta} + \frac{\partial r_{32}}{\partial \gamma} \dot{\gamma} \right) r_{22} + \left( \frac{\partial r_{33}}{\partial \alpha} \dot{\alpha} + \frac{\partial r_{33}}{\partial \beta} \dot{\beta} + \frac{\partial r_{33}}{\partial \gamma} \dot{\gamma} \right) r_{23}\\
&= \begin{pmatrix} 0 & -s\alpha & c\alpha s\beta \end{pmatrix} \dot{\Psi}
\end{align*}
\]
同理可得:
\[
\begin{align*}
\omega_y = \dot{r}_{11} r_{31} + \dot{r}_{12} r_{32} + \dot{r}_{13} r_{33} = \begin{pmatrix} 0 & c\alpha & s\alpha s\beta \end{pmatrix} \dot{\Psi}\\
\omega_z = \dot{r}_{21} r_{11} + \dot{r}_{22} r_{12} + \dot{r}_{23} r_{13} = \begin{pmatrix} 1 & 0 & c\beta \end{pmatrix} \dot{\Psi}
\end{align*}
\]
坐标变换
极坐标和直角坐标的雅克比矩阵推导 _ -CSDN
如果雅可比矩阵不是表示在 frame{0}
回想一下微积分中变量替换,替换变量的时候需要乘以雅可比矩阵行列式
柱坐标
例如,如果你的 end effector \((\rho, \theta, z)\)
\[
x = \rho \cos \theta\\
y = \rho \sin \theta\\
z = z
\]
那么转换矩阵 \(T_p\) p position
\[
T_p = \frac{\partial \begin{bmatrix} x \\ y \\ z \end{bmatrix}}{\partial \begin{bmatrix} \rho \\ \theta \\ z \end{bmatrix}} = \begin{bmatrix} \cos \theta & -\rho \sin \theta & 0 \\ \sin \theta & \rho \cos \theta & 0 \\ 0 & 0 & 1 \end{bmatrix}
\]
\[
\frac{\partial(x_1,x_2,\cdots,x_n)}{\partial(y_1,y_2,\cdots,y_m)}=\begin{bmatrix}\frac{\partial x_1}{\partial y_1}&\frac{\partial x_1}{\partial y_2}&\cdots&\frac{\partial x_1}{\partial y_m}\\\frac{\partial x_2}{\partial y_1}&\frac{\partial x_2}{\partial y_2}&\cdots&\frac{\partial x_2}{\partial y_m}\\\vdots&\vdots&&\vdots\\\frac{\partial x_n}{\partial y_1}&\frac{\partial x_n}{\partial y_2}&\cdots&\frac{\partial x_n}{\partial y_m}\end{bmatrix}
\]
而新的雅可比矩阵的上半部分就等于基本雅可比矩阵的 \(J_v\) \(T_p\)
\[
^i\boldsymbol{J}(\boldsymbol{\Phi})=\begin{pmatrix}{}_0^i\boldsymbol{R}&0\\0&{}_0^i\boldsymbol{R}\end{pmatrix}\boldsymbol{J}(\boldsymbol{\Phi})
\]
力域中的雅可比
笛卡尔力映射到关节上的力矩,不需要求解逆运动学
\[
\tau = J^T F
\]
是操作空间向关节空间的映射(与 \(\dot{x} = J \dot{\Phi}\)
证明方法 -
以机器人在末端笛卡儿空间所做的功与在关节空间所做的功相等,即
\[
F^T \delta x = \tau^T \delta \Phi
\]
注:力矩做功是力矩和角位移的积分
式中,\(F\) \(6 \times 1\) - \(\delta x\) \(6 \times 1\) \(\tau\) \(6 \times 1\) \(\delta \Phi\) \(6 \times 1\)
由雅可比矩阵的定义有(速度空间的映射)
\[
\delta x = J \delta \Phi
\]
\[
F^T J \delta \Phi = \tau^T \delta \Phi
\]
上式对所有的 \(\delta \Phi\)
\[
F^T J = \tau^T
\]
同取转置
\[
\tau = J^T F
\]
奇异性
奇异性理解
运动角度理解 :机械臂处在特定的关节位置组合(奇异位形)的时候,末端执行器会丢掉某个方向的自由度
完全伸直手臂之后,手无法沿着手臂方向移动
雅可比矩阵角度 :关节的运动速度乘以雅可比矩阵即得到 end effector end effector configuration end effector 在这个方向的速度总为 0 0
从线性代数的角度来说 :此时的 J aJa 相乘得到向量 b b 降秩 )
奇异位形求解
奇异位形:无法通过关节变量速度实现要求的末端速度
对于一般机器人,奇异位形为令雅可比矩阵 \(J\) \(\Phi\) , (\(N\)
\[
\text{rank}(J(\Phi) < \min(m, N)
\]
不同情况下的奇异点的判断条件为:
无冗余 (\(m = N\) ) : 在此 \(\Phi\) \(J(\Phi)\) \(\det(J(\Phi)) = 0\) 冗余 (\(m < N\) ) : 在此 \(\Phi\) \(J(\Phi)\) \(\text{rank}(J(\Phi)) < m\) 。 (可能有最小范数解)欠驱动 (\(m > N\) ) : 在此 \(\Phi\) \(J(\Phi)\) \(\text{rank}(J(\Phi)) < N\) 。 (可能有最小二乘解)
奇异位形是机器人的构型决定的,是机器人的固有特征
接近奇异位形的时候,存在机器人末端在工作空间中的微小速度导致关节空间产生过大速度:从线性方程的角度看,当机器人接近 Singularity ) ,很小的 dx dq Singularity
边界奇异性 : 工作空间边界的奇异位形。出现在机器人完全展开或者收回使得末端执行器处于或非常接近工作空间边界的情况。
内点奇异性 : 工作空间内部的奇异位形。出现在远离工作空间的边界,通常是由于两个或两个以上的关节轴线共线引起的。
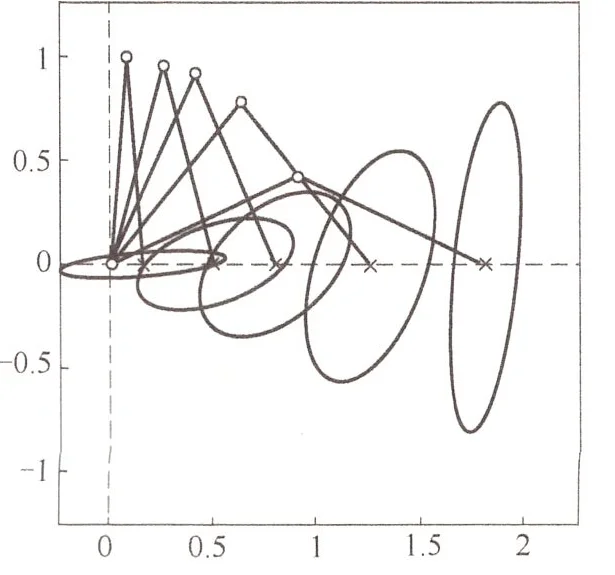
可操作度
二次型与椭圆
二次型对应椭球体。 椭球的轴沿着 \(A\) \(A\)
椭圆的标准方程: \(\frac{x^2}{a^2} + \frac{y^2}{b^2} = 1\) 。其中,椭圆的长轴长度为 \(2a\) \(2b\)
矩阵形式:
\[
\begin{bmatrix} x \\ y \end{bmatrix}^T \begin{bmatrix} \frac{1}{a^2} & 0 \\ 0 & \frac{1}{b^2} \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix} = x^T A x = 1
\]
特征值与特征向量:
矩阵 \(A\) \(\lambda_1 = \frac{1}{a^2}, \quad \lambda_2 = \frac{1}{b^2}\) ,特征值则表示了半长轴和半短轴长度平方的倒数。
对应的归一化特征向量为:\(\mu_1 = \begin{bmatrix} 1 \\ 0 \end{bmatrix}, \quad \mu_2 = \begin{bmatrix} 0 \\ 1 \end{bmatrix}\) ,表示了椭圆的长轴和短轴的方向
假设机器人有 \(N\) \(m\) \(N \geq m\) \(m \times N\) \(J\)
\[
J = U \Sigma V^T
\]
其中,\(\Sigma\) \(m \times N\) \(J\) \(\sigma_i = \sqrt{\lambda_i(JJ^T)} (i = 1, \cdots, m)\) \(\sigma_1 \geq \sigma_2 \geq \cdots \geq \sigma_m \geq 0\) \(U\) \(V\) \(m\) \(N\) \(U\) \(JJ^T\) \(u_i (i = 1, \cdots, m)\) \(V\) \(J^TJ\) \(v_i (i = 1, \cdots, N)\)
\[
v_e^T (J J^T)^{-1} v_e = (U^T v_e)^T \Sigma^{-2} (U^T v_e)
\]
此时,\(\Sigma^{-2} = \text{diag}(\sigma_1^{-2}, \sigma_2^{-2}, \cdots, \sigma_m^{-2})\) \(m\) \(\alpha = U^T v_e\)
\[
v_e^T (J J^T)^{-1} v_e - \alpha^T \Sigma^{-2} \alpha = \sum_{i=1}^m \frac{\alpha_i^2}{\sigma_i^2} \leq 1
\]
是一个标准的椭球体方程,表明机器人此位形的可操作椭球体的轴由向量 \(\sigma_i u_i\)
机器人关节速度取单位速度时,可操作椭球体轴的长度越大,在该轴方向上,所得到的末端速度可以越大,表明在该方向上运动能力越强;反之,轴的长度越小,在该轴方向上,所得到的末端速度被限制得越小,表明在该方向上运动能力越弱。因此,机器人位形的可操作椭球体描述了机器人改变末端位姿的能力。
定义可操作度,用来衡量机器人位形与奇异位形之间的距离
\[
\kappa(\boldsymbol{\Phi})=\sigma_1\sigma_2\cdots\sigma_m=\sqrt{\det(\boldsymbol{J}(\boldsymbol{\Phi})\boldsymbol{J}^\mathrm{T}(\boldsymbol{\Phi}))}
\]
特别的,当雅可比矩阵可逆的时候 \(\kappa(\boldsymbol{\Phi})=\mid\det(\boldsymbol{J}(\boldsymbol{\Phi}))\mid\)
冗余
“又矮又胖的矩阵”:关节自由度特别多的时候
这意味着,可以实现关节空间运动,而末端执行器不动,即
\[
\exists \dot{q} \neq 0, \quad J \dot{q} = 0
\]
指尖保持不动,只动手肘手腕
假如 J \(J\dot{q}=0\) J end effector singularity
但是,如果 J \(J\dot{q}=0\) " ") 。
题型
基础公式记忆
z-y-x 欧拉角
\[
\begin{align}
R_{z,y,x}(\alpha,\beta,\gamma) = \begin{pmatrix}
c\alpha c\beta & c\alpha s\beta s\gamma-s\alpha c\gamma & c\alpha s\beta c\gamma+s\alpha s\gamma \\
s\alpha c\beta & s\alpha s\beta s\gamma+c\alpha c\gamma & s\alpha s\beta c\gamma-c\alpha s\gamma \\
-s\beta & c\beta s\gamma & c\beta c\gamma
\end{pmatrix}
\end{align}
\]
MDH 建模下,坐标系齐次变换矩阵
\(^{i-1}_i \!T\) \(\{i-1\}\) \(\{i\}\) i 从 1
\[
^{i-1}_i \!T = \begin{pmatrix}
\cos \theta_i & -\sin \theta_i & 0 & a_{i-1} \\
\sin \theta_i \cos \alpha_{i-1} & \cos \theta_i \cos \alpha_{i-1} & -\sin \alpha_{i-1} & -\sin \alpha_{i-1} d_i \\
\sin \theta_i \sin \alpha_{i-1} & \cos \theta_i \sin \alpha_{i-1} & \cos \alpha_{i-1} & \cos \alpha_{i-1} d_i \\
0 & 0 & 0 & 1
\end{pmatrix}
\]
使用基向量表出的方法快速列写 /
几种方法对比
推荐方法
首选运动学方程微分方法,计算 \(J_v\)
然后列写各个坐标系下 \(^{0} z\) \(J_\omega\) 0
这两个方法只要 DH \({}^0_NT\)
方法
计算量
需要求解
注意点
运动学方程微分 中等
正运动学方程 \(^0_nT\)
确保正确求导,注意矩阵维度一致性
向量积构造法 较低
各关节轴的单位向量 \(\hat{Z}_i\) \(O_i\)
\(\hat{Z}_i\) \(O_i\)
速度传递 较高
各连杆的旋转矩阵 \(^{i+1}_iR\) \(^iP_{i+1}\)
确保旋转矩阵和位置向量的正确性,注意旋转矩阵的转置操作
力传递 较高
各连杆的旋转矩阵 \(^{i+1}_iR\) \(^iP_{i+1}\)
求解的雅可比需要转置,需要乘 R
求雅可比矩阵 - \(J_v\)
由正运动学,求解 \(^0_nT\)
\[
^0_nT = \begin{pmatrix} ^0_nR & ^0_nP \\ 0 & 1 \end{pmatrix}
\]
对上式求导,得到
\[
P' = \frac{d P}{d t} = J(\theta) \dot{\theta}
\]
即可得到雅可比矩阵
求雅可比矩阵 - \(J_v\) \(J_\omega\)
计算每一个关节对于连杆 N
平动型关节
若第 \(i\)
\[
v_N^{(i)} = d_i \hat{Z}_i \quad \omega_N^{(i)} = 0
\]
转动型关节
若第 \(i\) \(v_N^{(i)} = \dot{\theta}_i \hat{Z}_i \times (O_N - O_i) \quad \omega_N^{(i)} = \dot{\theta}_i \hat{Z}_i\)
为什么要叉乘:类似于“力矩”中“矩”的概念
\(O_i\) \({i}\) \(\hat{Z}_i\) 转轴单位向量
这里要特别注意,\(\hat{Z}_i\) 单位向量
在三维空间里,角速度定义为一个指向旋转轴的向量,其方向由右手定则确定。
每个旋转关节都是绕自身的 z \(\omega\) contribute end effector \([0, 0, \omega]\)
但是由于基础雅可比矩阵是以 frame{0} \([0, 0, \omega]\) frame{0} .
求雅可比矩阵 - -
知道了这样的变换方法,就可以从连杆 0 N
向外迭代法是计算机器人几何雅可比矩阵的方法之一
转动型关节
角速度:连杆 i+1 {i+1}
\[
^{i+1}\!\omega_{i+1} = ^{i+1}_i\!R {^i\omega_i} + \dot{\theta}_{i+1} {}^{i+1}\!\hat{Z}_{i+1}\\
\]
其中,\(\hat{Z}_{i+1}\) \(i+1\) \({i+1}\) \({\theta}_{i+1}\) \(i+1\)
线速度:连杆 i+1 {i+1}
\[
{}^{i+1}\!v_{i+1} = {^{i+1}_iR} (^iv_i + ^i\omega_i \times {^iP_{i+1}})
\]
连杆的长度隐含在了 \(^iP_{i+1}\)
公式不要记错,这里要注意 \(^{i+1}_i\!R\) \((^{i}_{i+1}\!R)^T\)
平动型关节
角速度:不变
\[
^{i+1}\omega_{i+1} = _i^{i+1}R {^i\omega_i}
\]
线速度:要加一个在轴线上的速度
\[
^{i+1}v_{i+1} = _i^{i+1}R (^iv_i + ^i\omega_i \times ^iP_{i+1}) + \dot{d_{i+1}} \hat{Z}_{i+1}
\]
求雅可比矩阵 - -
\[
\begin{align*}
^i f_i = ^{i}_{i+1}R ^{i+1} f_{i+1}\\
^i n_i = ^{i}_{i+1}R^{i+1} n_{i+1} + ^{i}P_{i+1} \times ^{i}f_{i}
\end{align*}
\]
转动型关节需要考虑施加多少力矩 , . ( )
转动型关节 \(i\)
\[
\tau_i = |n_i| \cos \theta = |n_i| |\hat{z}_i| \cos \theta = n_i^{\mathrm{T}} \hat{z}_i
\]
平动型关节 \(i\)
\[
\tau_i = f_i^{\mathrm{T}} \hat{z}_i
\]
将式子写成矩阵的形式,即可得到
\[
\tau = J^T F
\]
取转置,得到 \(\boldsymbol{^iJ}\)
但是要注意到,这里的雅可比矩阵需要转到全局下
\[
\boldsymbol{J}(\boldsymbol{\Phi})= ^0_i\boldsymbol{R} \boldsymbol{^iJ}(\boldsymbol{\Phi})
\]
末端给出力 /
写出完整的 \(6\times n\)
列写末端 \(\begin{pmatrix}f_x&f_y&f_z&n_x&n_y&n_z\end{pmatrix}^T\)
解方程,得到关节力矩
\[
\tau=J^T F
\]
例题
5-3
若 \(R\in\text{SO}(3)\) \(a\in\mathbb{R}^3\) ,\(B\in\mathbb{R}^{3\times3}\) ,证明 \(R(a^\wedge B)=(Ra)^\wedge(RB)\)
证明:证明很多,提供其中一种:
因为 \(\det(x,a,b)=\langle x,a\times b\rangle\) \(\forall x\in\mathbb{R}^3\)
令 \(R\in\text{RO}(3)\) \(R^T=R^{-1}\) \(\(\langle x,R(a\times b)\rangle=\langle R^Tx,a\times b\rangle=\langle R^{-1}x,a\times b\rangle=\det(R^{-1},a,b)\) \)
由于\(\det(R)=1\) ,可以得到:
\[
=\det(R)\det(R^{-1}x,a,b)=\det(x,Ra,Rb)=\langle x,Ra\times Rb\rangle
\]
最后由于 \(\langle x,R(a\times b)\rangle=\langle x,Ra\times Rb\rangle\) \(x\in\mathbb{R}^3\)
\[
R(a\times b)=Ra\times Rb,\text{即}R(a^\wedge b)=(Ra)^\wedge(Rb)
\]
由 \(B\in\mathbb{R}^{3\times3}\) \(B=\begin{pmatrix}b_1&b_2&b_3\end{pmatrix}\)
\[
\begin{aligned}R(a^\wedge B)&=R\left(a^\wedge\begin{pmatrix}b_1&b_2&b_3\end{pmatrix}\right)=R\left(\begin{pmatrix}a^\wedge b_1&a^\wedge b_2&a^\wedge b_3\end{pmatrix}\right)\\&=\begin{pmatrix}R(a^\wedge b_1)&R(a^\wedge b_2)&R(a^\wedge b_3)\end{pmatrix}=\begin{pmatrix}Ra^\wedge Rb_1&Ra^\wedge Rb_2&Ra^\wedge Rb_3\end{pmatrix}\\&=Ra^\wedge\begin{pmatrix}Rb_1&Rb_2&Rb_3\end{pmatrix}=Ra^\wedge R\begin{pmatrix}b_1&b_2&b_3\end{pmatrix}=Ra^\wedge RB\end{aligned}
\]
5-4
角速率的关系为 \(\omega=B(\Psi)\dot{\Psi}\) \(B(\Psi)\)
\[\begin{aligned}
&\Psi=\begin{bmatrix}\alpha\\\beta\\\gamma\end{bmatrix},\dot{\Psi}=\begin{bmatrix}\dot{\alpha}\\\dot{\beta}\\\dot{\gamma}\end{bmatrix},R=\begin{bmatrix}c\alpha c\beta&c\alpha s\beta s\gamma-s\alpha c\gamma&c\alpha s\beta c\gamma+s\alpha s\gamma\\s\alpha s\beta&s\alpha s\beta s\gamma+c\alpha c\gamma&s\alpha s\beta c\gamma-c\alpha s\gamma\\-s\beta&c\beta s\gamma&c\beta c\gamma\end{bmatrix},\dot{R}R^T=\begin{bmatrix}0&-Q_Z&Q_Y\\\Omega_Z&0&-Q_X\\-\Omega_Y&\Omega_X&0\end{bmatrix}\\
\end{aligned}
\]
\[
\begin{aligned}
\Omega_{X}&=\dot{r}_{31}r_{21}+\dot{r}_{32}r_{22}+\dot{r}_{33}r_{33}\\&=-s\alpha c\beta c\beta\dot{\beta}+(s\alpha s\beta s\gamma+c\alpha c\gamma)\left(c\beta c\gamma\dot{\gamma}-s\beta s\gamma\dot{\beta}\right)+(s\alpha s\beta c\gamma-c\alpha s\gamma)\left(-s\beta c\gamma\dot{\beta}-c\beta s\gamma\dot{\gamma}\right)=-s\alpha c\beta c\beta\dot{\beta}-s\alpha s\beta s\beta\dot{\beta}+c\alpha c\beta\dot{\gamma}=-s\alpha\dot{\beta}+c\alpha c\beta\dot{\gamma}\\
\Omega_Y&=\dot{r}_{11}r_{31}+\dot{r}_{12}r_{32}+\dot{r}_{13}r_{33}=c\alpha\dot{\beta}+c\beta s\alpha\dot{\gamma}\\
\Omega_Z&=\dot{r}_{21}r_{11}+\dot{r}_{22}r_{12}+\dot{r}_{23}r_{13}=\dot{\alpha}-s\beta\dot{\gamma}\\
\end{aligned}
\]
\[
B(\Psi)=\begin{bmatrix}0&-s\alpha&c\alpha c\beta\\0&c\alpha&c\beta s\alpha\\1&0&-s\beta\end{bmatrix}
\]